Трехфазный бесколлекторный двигатель. "бесколлекторные двигатели" ликбез и проектирование
Опубліковано 11.04.2014
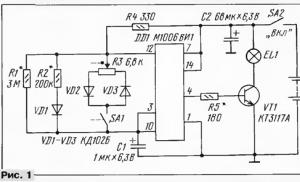
Схема регулятора
Схема условно разделена на две части: левая – микроконтроллер с логикой, правая – силовая часть. Силовую часть можно модифицировать для работы с двигателями другой мощности или с другим питающим напряжением.
Контроллер – ATMEGA168 . Гурманы могут сказать, что хватило бы и ATMEGA88 , а AT90PWM3 – это было бы “вааще по феншую”. Первый регулятор я как раз делал “по феншую”. Если у Вас есть возможность применять AT90PWM3 – это будет наиболее подходящий выбор. Но для моих задумок решительно не хватало 8 килобайт памяти. Поэтому я применил микроконтроллер ATMEGA168 .
Эта схема задумывалась как испытательный стенд. На котором предполагалось создать универсальный настраиваемый регулятор для работы с различными “калибрами” бесколлекторных двигателей: как с датчиками, так и без датчиков положения. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков.
Питание
Питание схемы раздельное. Поскольку драйверы ключей требуют питание от 10В до 20В, используется питание 12В. Питание микроконтроллера осуществляется через DC-DC преобразователь, собранный на микросхеме . Можете применять линейный стабилизатор с выходным напряжением 5В. Предполагается, что напряжение VD может быть от 12В и выше и ограничивается возможностями драйвера ключей и самими ключами.
ШИМ и сигналы для ключей
На выходе OC0B(PD5) микроконтроллера U1 генерируется ШИМ сигнал. Он поступает на переключатели JP2 , JP3 . Этими переключателями можно выбрать вариант подачи ШИМ на ключи (на верхние, нижние или на все ключи). На схеме переключатель JP2 установлен в положение для подачи ШИМ сигнала на верхние ключи. Переключатель JP3 на схеме установлен в положение для отключения подачи ШИМ сигнала на нижние ключи. Не трудно догадаться, что если отключить ШИМ на верхних и нижних ключах, мы получим на выходе перманентный “полный вперед”, что может разорвать двигатель или регулятор в хлам. Поэтому, не забываем включать голову, переключая их. Если Вам не потребуется такие эксперименты – и Вы знаете, на какие ключи Вы будите подавать ШИМ, а на какие нет, просто не делайте переключателей. После переключателей ШИМ сигнал поступает на входы элементы логики “&” (U2 , U3 ). На эту же логику поступают 6 сигналов с выводов микроконтроллера PB0..PB5 , которые являются управляющими сигналами для 6 ключей. Таким образом, логические элементы (U2 , U3 ) накладывают ШИМ сигнал на управляющие сигналы. Если Вы уверены, что будете подавать ШИМ, скажем, только на нижние ключи, тогда ненужные элементы (U2 ) можно исключить из схемы, а соответствующие сигналы с микроконтроллера подавать на драйверы ключей. Т.е. на драйверы верхних ключей сигналы пойдут напрямую с микроконтроллера, а на нижние – через логические элементы.
Обратная связь (контроль напряжения фаз двигателя)
Напряжение фаз двигателя W ,V ,U через резистивные делители W – (R17,R25) , V – (R18, R24) , U – (R19, R23) поступают на входа контроллера ADC0(PC0) , ADC1(PC1) , ADC2(PC2) . Эти выводы используются как входы компараторов. (В примере описанном в AVR444.pdf от компании Atmel применяют не компараторы, а измерение напряжения с помощью ADC (АЦП). Я отказался от этого метода, поскольку время преобразования ADC не позволяло управлять скоростными двигателями). Резистивные делители выбираются таким образом, чтобы напряжение, подаваемое на вход микроконтроллера, не превышало допустимое. В данном случае, резисторами 10К и 5К делится на 3. Т.е. При питании двигателя 12В. на микроконтроллер будет подаваться 12В*5К/(10К+5К) = 4В . Опорное напряжение для компаратора (вход AIN1 ) подается от половинного напряжения питания двигателя через делитель (R5 , R6 , R7 , R8 ). Обратите внимание, резисторы (R5 , R6 ) по номиналу такие же, как и (R17,R25 ), (R18, R24 ),(R19, R23 ). Далее напряжение уменьшается вдвое делителем R7, R8 , после чего поступает на ногу AIN1 внутреннего компаратора микроконтроллера. Переключатель JP1 позволяет переключить опорное напряжение на напряжение “средней точки” формируемое резисторами (R20, R21, R22 ). Это делалось для экспериментов и себя не оправдало. Если нет в необходимости, JP1, R20, R21, R22 можно исключить из схемы.
Датчики Холла
Поскольку регулятор универсальный, он должен принимать сигналы от датчиков Холла в том случае, если используется двигатель с датчиками. Предполагается, что датчики Холла дискретные, тип SS41 . Допускается применение и других типов датчиков с дискретным выходом. Сигналы от трех датчиков поступают через резисторы R11, R12, R13 на переключатели JP4, JP5, JP6 . Резисторы R16, R15, R14 выступают в качестве подтягивающих резисторов. C7, С8, С9 – фильтрующие конденсаторы. Переключателями JP4, JP5, JP6 выбирается тип обратной связи с двигателем. Кроме изменения положения переключателей в программных настройках регулятора следует указать соответствующий тип двигателя (Sensorless или Sensored ).
Измерения аналоговых сигналов
На вход ADC5(PC5) через делитель R5, R6 подается напряжения питания двигателя. Это напряжение контролируется микроконтроллером.
На вход ADC3(PC3) поступает аналоговый сигнал от датчика тока. Датчик тока ACS756SA . Это датчик тока на основе эффекта Холла. Преимущество этого датчика в том, что он не использует шунт, а значит, имеет внутреннее сопротивление близкое к нулю, поэтому на нем не происходит тепловыделения. Кроме того, выход датчика аналоговый в пределах 5В, поэтому без каких-либо преобразований подается на вход АЦП микроконтроллера, что упрощает схему. Если потребуется датчик с большим диапазоном измерения тока, Вы просто заменяете существующий датчик новым, абсолютно не изменяя схему.
Если Вам хочется использовать шунт с последующей схемой усиления, согласования – пожалуйста.
Задающие сигналы
Сигнал, задающий обороты двигателя, с потенциометра RV1 поступает на вход ADC4(PC4) . Обратите внимание на резистор R9 – он шунтирует сигнал в случае обрыва провода к потенциометру.
Кроме того, есть вход RC сигнала, который повсеместно используется в дистанционно управляемых моделях. Выбор управляющего входа и его калибровка выполняется в программных настройках регулятора.
UART интерфейс
Сигналы TX, RX используются для настройки регулятора и выдачи информации о состоянии регулятора – обороты двигателя, ток, напряжение питания и т.п. Для настройки регулятора его можно подключить к USB порту компьютера, используя . Настройка выполняется через любую программу терминала. Например: Hyperterminal или Putty .
Прочее
Также имеются контакты реверса – вывод микроконтроллера PD3 . Если замкнуть эти контакты перед стартом двигателя, двигатель будет вращаться в обратном направлении.
Светодиод, сигнализирующий о состоянии регулятора, подключен к выводу PD4 .
Силовая часть
Драйвера ключей использовались IR2101 . У этого драйвера одно преимущество – низкая цена. Для слаботочных систем подойдет, для мощных ключей IR2101 будет слабоват. Один драйвер управляет двумя “N” канальными MOSFET транзисторами (верхним и нижним). Нам понадобиться три таких микросхемы.
Ключи нужно выбирать в зависимости от максимального тока и напряжения питания двигателя (выбору ключей и драйверов будет посвящена отдельная статья). На схеме обозначены IR540 , в реальности использовались K3069 . K3069 рассчитаны на напряжение 60В и ток 75А. Это явный перебор, но мне они достались даром в большом количестве (желаю и Вам такого счастья).
Конденсатор С19 включается параллельно питающей батареи. Чем больше его емкость – тем лучше. Этот конденсатор защищает батарею от бросков тока и ключи от значительной просадки напряжения. При отсутствии этого конденсатора Вам обеспечены как минимум проблемы с ключами. Если подключать батарею сразу к VD – может проскакивать искра. Искрогасящий резистор R32 используется в момент подключения к питающей батарее. Сразу подключаем “– ” батареи, затем подаем “+ ” на контакт Antispark . Ток течет через резистор и плавно заряжает конденсатор С19 . Через несколько секунд, подключаем контакт батареи к VD . При питании 12В можно Antispark не делать.
Возможности прошивки
- возможность управлять двигателями с датчиками и без;
- для бездатчикового двигателя три вида старта: без определения первоначального положения; с определением первоначального положения; комбинированный;
- настройка угла опережения фазы для бездатчикового двигателя с шагом 1 градус;
- возможность использовать один из двух задающих входов: 1-аналоговый, 2-RC;
- калибровка входных сигналов;
- реверс двигателя;
- настройка регулятора по порту UART и получение данных от регулятора во время работы (обороты, ток, напряжение батареи);
- частота ШИМ 16, 32 КГц.
- настройка уровня ШИМ сигнала для старта двигателя;
- контроль напряжения батарей. Два порога: ограничение и отсечка. При снижении напряжения батареи до порога ограничения обороты двигателя понижаются. При снижении ниже порога отсечки происходит полная остановка;
- контроль тока двигателя. Два порога: ограничение и отсечка;
- настраиваемый демпфер задающего сигнала;
- настройка Dead time для ключей
Работа регулятора
Включение
Напряжение питания регулятора и двигателя раздельное, поэтому может возникнуть вопрос: в какой последовательности подавать напряжение. Я рекомендую подавать напряжение на схему регулятора. А затем подключать напряжение питания двигателя. Хотя при другой последовательности проблем не возникало. Соответственно, при одновременной подаче напряжения также проблем не возникало.
После включения двигатель издает 1 короткий сигнал (если звук не отключен), включается и постоянно светится светодиод. Регулятор готов к работе.
Для запуска двигателя следует увеличивать величину задающего сигнала. В случае использования задающего потенциометра, запуск двигателя начнется при достижении задающего напряжения уровня примерно 0.14 В. При необходимости можно выполнить калибровку входного сигнала, что позволяет использовать раные диапазоны управляющих напряжений. По умолчанию настроен демпфер задающего сигнала. При резком скачке задающего сигнала обороты двигателя будут расти плавно. Демпфер имеет несимметричную характеристику. Сброс оборотов происходит без задержки. При необходимости демпфер можно настроить или вовсе отключить.
Запуск
Запуск бездатчикового двигателя выполняется с установленным в настройках уровнем стартового напряжения. В момент старта положение ручки газа роли значения не имеет. При неудачной попытке старта попытка запуска повторяется, пока двигатель не начнет нормально вращаться. Если двигатель не может запуститься в течение 2-3 секунд попытки следует прекратить, убрать газ и перейти к настройке регулятора.
При опрокидывании двигателя или механическом заклинивании ротора срабатывает защита, и регулятор пытается перезапустить двигатель.
Запуск двигателя с датчиками Холла также выполняется с применением настроек для старта двигателя. Т.е. если для запуска двигателя с датчиками дать полный газ, то регулятор подаст напряжение, которое указано в настройках для старта. И только после того, как двигатель начнет вращаться, будет подано полное напряжение. Это несколько нестандартно для двигателя с датчиками, поскольку такие двигатели в основном применяются как тяговые, а в данном случае достичь максимального крутящего момента на старте, возможно, будет сложно. Тем не менее, в данном регуляторе присутствует такая особенность, которая защищает двигатель и регулятор от выхода со строя при механическом заклинивании двигателя.
Во время работы регулятор выдает данные об оборотах двигателя, токе, напряжении батарей через порт UART в формате:
E:минимальное напряжение батареи: максимальное напряжение батареи: максимальный ток: обороты двигателя (об/мин) A:текущее напряжение батареи: текущий ток: текущие обороты двигателя (об/мин)
Данные выдаются с периодичностью примерно 1 секунда. Скорость передачи по порту 9600.
Настройка регулятора
Для настройки регулятора его следует подключить к компьютеру с помощью . Скорость передачи по порту 9600.
Переход регулятора в режим настройки происходит при включении регулятора, когда задающий сигнал потенциометра больше нуля. Т.е. Для перевода регулятора в режим настройки следует повернуть ручку задающего потенциометра, после чего включить регулятор. В терминале появится приглашение в виде символа “> “. После чего можно вводить команды.
Регулятор воспринимает следующие команды (в разных версиях прошивки набор настроек и команд может отличаться):
h
– вывод списка команд;
?
– вывод настроек;
c
– калибровка задающего сигнала;
d
– сброс настроек к заводским настройкам.
команда “? ” выводит в терминал список всех доступных настроек и их значение. Например:
Motor.type=0 motor.magnets=12 motor.angle=7 motor.start.type=0 motor.start.time=10 pwm=32 pwm.start=15 pwm.min=10 voltage.limit=128 voltage.cutoff=120 current.limit=200 current.cutoff=250 system.sound=1 system.input=0 system.damper=10 system.deadtime=1
Изменить нужную настройку можно командой следующего формата:
<настройка>=<значение>
Например:
pwm.start=15
Если команда была дана корректно, настройка будет применена и сохранена. Проверить текущие настройки после их изменения можно командой “? “.
Измерения аналоговых сигналов (напряжение, ток) выполняются с помощью АЦП микроконтроллера. АЦП работает в 8-ми битном режиме. Точность измерения занижена намеренно для обеспечения приемлемой скорости преобразования аналогового сигнала. Соответственно, все аналоговые величины регулятор выдает в виде 8-ми битного числа, т.е. от 0 до 255.
Назначение настроек:
Список настроек, их описание:
| Параметр | Описание | Значение |
|---|---|---|
| motor.type | Тип мотора | 0-Sensorless; 1-Sensored |
| motor.magnets | Кол.во магнитов в роторе двигателя. Изпользуется только для расчета оборотов двигателя. | 0..255, шт. |
| motor.angle | Угол опережения фазы. Используется только для Sensorless двигателей. | 0..30, градусов |
| motor.start.type | Тип старта. Используется только для Sensorless двигателей. | 0-без определения положения ротора; 1-с определением положения ротора; 2-комбинированный; |
| motor.start.time | Время старта. | 0..255, мс |
| pwm | Частота PWM | 16, 32, КГц |
| pwm.start | Значение PWM (%) для старта двигателя. | 0..50 % |
| pwm.min | Значение минимального значения PWM (%), при котором двигатель вращается. | 0..30 % |
| voltage.limit | Напряжение батареи, при котором следует ограничивать мощность, подаваемую на двигатель. Указывается в показаниях ADC. | 0..255* |
| voltage.cutoff | Напряжение батареи, при котором следует выключать двигатель. Указывается в показаниях ADC. | 0..255* |
| current.limit | Ток, при котором следует ограничивать мощность, подаваемую на двигатель. Указывается в показаниях ADC. | 0..255** |
| current.cutoff | Ток, при котором следует выключать двигатель. Указывается в показаниях ADC. | 0..255** |
| system.sound | Включить/выключить звуковой сигнал, издаваемый двигателем | 0-выключен; 1-включен; |
| system.input | Задающий сигнал | 0-потенциометр; 1-RC сигнал; |
| system.damper | Демпфирование входного сигнала | 0..255, условные единицы |
| system.deadtime | Значение Dead Time для ключей в микросекундах | 0..2, мкс |
* – числовое значение 8-ми битного аналого цифрового преобразователя.
Рассчитывается по формуле: ADC = (U*R6/(R5+R6))*255/5
Где: U
– напряжение в Вольтах; R5, R6
– сопротивление резисторов делителя в Омах.
Двигатели используются во многих областях техники. Для того чтобы происходило вращение ротора двигателя необходимо наличие вращающегося магнитного поля. В обычных двигателях постоянного тока это вращение осуществляется механическим способом с помощью щеток, скользящих по коллектору. При этом возникает искрение, а, кроме того, из-за трения и износа щеток для таких двигателей необходимо постоянное техническое обслуживание.
Благодаря развитию техники стало возможным генерировать вращающееся магнитное поле электронным способом, что было воплощено в бесколлекторных двигателях постоянного тока (БДПТ).
Устройство и принцип действия
Основными элементами БДПТ являются:
- ротор , на котором укреплены постоянные магниты;
- статор , на котором установлены обмотки;
- электронный контроллер .
По конструкции такой двигатель может быть двух типов:
с внутренним расположением ротора (inrunner)

с внешним расположением ротора (outrunner)
В первом случае ротор вращается внутри статора, а во втором – ротор крутится вокруг статора.
Двигатель типа inrunner используется в том случае, когда необходимо получить большие обороты вращения. Этот двигатель имеет более простую стандартную конструкцию, которая позволяет использовать неподвижный статор для крепления двигателя.
Двигатель типа outrunner подходит для получения большого момента при низких оборотах. В этом случае крепление двигателя производится с использованием неподвижной оси.
Двигатель типа inrunner — большие обороты, низкий крутящий момент. Двигатель типа outrunner — маленькие обороты, высокий крутящий момент.
Число полюсов в БДПТ может быть разным. По числу полюсов можно судить о некоторых характеристиках двигателя. Например, двигатель с ротором, имеющим 2 полюса, имеет большее число оборотов и малый момент. Двигатели с увеличенным количеством полюсов имеют больший момент, но меньшее число оборотов. Изменением числа полюсов ротора можно менять число оборотов двигателя. Таким образом, изменяя конструкцию двигателя, производитель может подобрать необходимые параметры двигателя по моменту и числу оборотов.
Управление БДПТ

Регулятор оборотов, внешний вид
Для управления бесколлекторным двигателем используется специальный контролер — регулятор скорости вращения вала двигателя постоянного тока. Его задачей является генерация и подача в нужный момент на нужную обмотку необходимого напряжения. В контроллере для приборов с питанием от сети 220 В чаще всего используется инверторная схема, в которой происходит преобразование тока с частотой 50 Гц сначала в постоянный ток, а затем в сигналы с широтно-импульсной модуляцией (ШИМ). Для подачи питающего напряжения на обмотки статора используются мощные электронные ключи на биполярных транзисторах или других силовых элементах.
Регулировка мощности и числа оборотов двигателя осуществляется изменением скважности импульсов, а, следовательно, и действующим значением напряжения, подаваемого на обмотки статора двигателя.

Принципиальная схема регулятора оборотов. К1-К6 — ключи D1-D3 — датчики положения ротора (датчики Холла)
Важным вопросом является своевременное подключение электронных ключей к каждой обмотке. Для обеспечения этого контроллер должен определять положение ротора и его скорость . Для получения такой информации могут быть использованы оптические или магнитные датчики (например, датчики Холла ), а также обратные магнитные поля.
Более распространено использование датчиков Холла , которые реагируют на наличие магнитного поля . Датчики размещаются на статоре таким образом, чтобы на них действовало магнитное поле ротора. В некоторых случаях датчики устанавливают в устройствах, которые позволяют изменять положение датчиков и, соответственно, регулировать угол опережения (timing).
Регуляторы оборотов вращения ротора очень чувствительны к силе тока, проходящего через него. Если вы подберете аккумуляторную батарейку с большей выдаваемой силой тока, то регулятор сгорит! Правильно подбирайте сочетания характеристик!
Достоинства и недостатки
По сравнению с обычными двигателями БДПТ имеют следующие достоинства:
- большой кпд ;
- высокое быстродействие ;
- возможность изменения частоты вращения ;
- отсутствие искрящих щеток ;
- малые шумы , как в звуковом, так и высокочастотном диапазонах;
- надежность ;
- способность противостоять перегрузкам по моменту ;
- отличное соотношение габаритов и мощности .
Бесколлекторный двигатель отличается большим кпд. Он может достигать 93-95%.
Высокая надежность механической части БД объясняется тем, что в нем используются шарикоподшипники и отсутствуют щетки. Размагничивание постоянных магнитов происходит довольно медленно, особенно, если они выполнены с использованием редкоземельных элементов. При использовании в контроллере защиты по току срок службы этого узла довольно высок. Фактически срок службы БДПТ может определяться сроком службы шарикоподшипников .
Недостатками БДПТ является сложность системы управления и высокая стоимость.
Применение
Области применения БДТП следующие:
- создание моделей ;
- медицина ;
- автомобилестроение ;
- нефтегазовая промышленность ;
- бытовые приборы ;
- военная техника .
 Использование БД для авиамоделей
дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета.
Использование БД для авиамоделей
дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета.
Благодаря малому шуму и отсутствию нагревания при работе БДПТ широко используются в медицине, особенно в стоматологии.
В автомобилях такие двигатели используются в подъемниках стекол, электростеклоочистителях, омывателях фар и электрорегуляторах подъема кресел .
Отсутствие коллектора и искрения щеток позволяет использовать БД в качестве элементов запорных устройств в нефтегазовой промышленности .
В качестве примера использования БД в бытовой технике можно отметить стиральную машину с прямым приводом барабана компании LG. Эта компания использует БДТП типа Outrunner. На роторе двигателя имеется 12 магнитов, а на статоре – 36 катушек индуктивности, которые намотаны проводом диаметром в 1 мм на сердечники из магнитопроводящей стали. Катушки соединены последовательно по 12 штук в фазе. Сопротивление каждой фазы равно 12 Ом. В качестве датчика положения ротора используется датчик Холла. Ротор двигателя крепится к баку стиральной машины.
 Повсеместно данный двигатель используется в жестких дисках для компьютеров, что делает их компактными, в CD и DVD приводах и системах охлаждения для микро-электронотехнических устройств и не только.
Повсеместно данный двигатель используется в жестких дисках для компьютеров, что делает их компактными, в CD и DVD приводах и системах охлаждения для микро-электронотехнических устройств и не только.
Наряду с БД малой и средней мощности в промышленности с тяжелыми условиями работы, судовой и военной промышленностях все больше используются большие БДПТ.
БД большой мощности разработаны для американских ВМС. Например, компания Powertec разработала БДТП мощностью 220 кВт со скоростью в 2000 об/мин. Момент двигателя достигает 1080 Нм.
Кроме указанных областей, БД применяются в проектах станков, прессов, линий для обработки пластмасс, а также в ветроэнергетике и использовании энергии приливных волн.
Характеристики
Основные характеристики двигателя:
- номинальная мощность ;
- максимальная мощность ;
- максимальный ток ;
- максимальное рабочее напряжение ;
- максимальные обороты (или коэффициент Kv);
- сопротивление обмоток ;
- угол опережения ;
- режим работы ;
- габаритно-массовые характеристики двигателя.
Основным показателем двигателя является его номинальная мощность, то есть мощность, вырабатываемая двигателем в течение длительного времени его работы.
 Максимальная мощность
– это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальная мощность
– это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальный ток . Для Astro Flight 020 он равен 25 А.
Максимальное рабочее напряжение – напряжение, которое могут выдержать обмотки двигателя. Для Astro Flight 020 задан диапазон рабочих напряжений от 6 до 12 В.
Максимальное число оборотов двигателя . Иногда в паспорте указывается коэффициент Kv – число оборотов двигателя на один вольт. Для Astro Flight 020 Kv= 2567 об/В. В этом случае максимальное число оборотов можно определить умножением этого коэффициента на максимальное рабочее напряжение.
Обычно сопротивление обмоток для двигателей составляет десятые или тысячные доли Ома. Для Astro Flight 020 R= 0,07 Ом. Это сопротивление влияет на кпд БДПТ.
Угол опережения представляет собой опережение переключения напряжений на обмотках. Оно связано с индуктивным характером сопротивления обмоток.
Режим работы может быть длительным или кратковременным. При долговременном режиме двигатель может работать длительное время. При этом выделяемое им тепло полностью рассеивается и он не перегревается. В таком режиме работают двигатели, например, в вентиляторах, конвейерах или эскалаторах. Кратковременный режим используется для таких устройств, как например, лифт, электробритва. В этих случаях двигатель работает короткое время, а затем долгое время остывает.
В паспорте на двигатель приводятся его размеры и масса. Кроме того, например, для двигателей, предназначенных для авиамоделей, приводятся посадочные размеры и диаметр вала. В частности, для двигателя Astro Flight 020 приведены следующие характеристики:
- длина равна 1,75”;
- диаметр равен 0,98”;
- диаметр вала равен 1/8”;
- вес равен 2,5 унции.
Выводы:
- В моделировании, в различных технических изделиях, в промышленности и в оборонной технике используются БДПТ, в которых вращающееся магнитное поле формируется электронной схемой.
- По своей конструкции БДПТ могут быть с внутренним (inrunner) и внешним (outrunner) расположением ротора.
- По сравнению с другими двигателями БДПТ имеют ряд преимуществ, основными из которых являются отсутствие щеток и искрения, большой кпд и высокая надежность.
Одна из причин, по которой конструкторы проявляют интерес именно к бесколлекторным электродвигателям — это необходимость в высокооборотных моторах с небольшими размерами. Причём у этих двигателей очень точное позиционирование. В конструкции имеется подвижный ротор и неподвижный статор. На роторе находится один постоянный магнит или несколько, расположенных в определённой последовательности. На статоре же находятся катушки, которые создают магнитное поле.
Нужно отметить еще одну особенность — бесколлекторные электродвигатели могут иметь якорь, расположенный как внутри, так и на внешней стороне. Следовательно, два типа конструкции могут иметь определенное применение в различных сферах. При расположении якоря внутри получается добиться очень высокой скорости вращения, поэтому такие моторы очень хорошо работают в конструкциях систем охлаждения. В том случае, если устанавливается привод с внешним расположением ротора, можно добиться очень точного позиционирования, а также высокой устойчивости к перегрузкам. Очень часто такие моторы используются в робототехнике, медицинском оборудовании, в станках с частотным программным управлением.
Как работают моторы
Для того чтобы привести в движение ротор бесколлекторного электродвигателя постоянного тока необходимо использовать специальный микроконтроллер. Его не получится запустить таким же образом, как синхронную или асинхронную машину. При помощи микроконтроллера получается включить обмотки двигателя так, чтобы направление векторов магнитных полей на статоре и якоре были ортогональны.

Другими словами, при помощи драйвера получается регулировать который действует на ротор бесколлекторного двигателя. Чтобы переместить якорь необходимо осуществить правильную коммутацию в обмотках статора. К сожалению, обеспечить плавное управление вращением не получается. Зато можно очень быстро увеличить ротора электродвигателя.
Отличия коллекторных и бесколлекторных двигателей
Основное отличие заключается в том, что на бесколлекторных электродвигателях для моделей отсутствует обмотка на роторе. В случае с коллекторными электромоторами, на их роторах имеются обмотки. А вот постоянные магниты устанавливаются на неподвижной части двигателя. Кроме того, на роторе устанавливается специальной конструкции коллектор, к которому производится подключение графитовых щёток. С их помощью подается напряжение на обмотку ротора. Принцип работы бесколлекторного электродвигателя тоже существенно отличается.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.

Скорость вращения ротора зависит напрямую от того, насколько интенсивно магнитное поле, а последняя характеристика зависит напрямую от величины напряжения. Следовательно, чтобы увеличить или уменьшить частоту вращения, необходимо изменить напряжение питания.
Для реализации реверса потребуется только лишь изменить полярность подключения мотора. Для такого управления не нужно использовать специальные микроконтроллеры, изменять частоту вращения можно при помощи обычного переменного резистора.
Особенности бесколлекторных машин
Но вот управление бесколлекторным электродвигателем невозможно без использования специальных контроллеров. Исходя из этого, можно сделать вывод, что в качестве генератора моторы такого типа применяться не могут. Для эффективности управления можно отслеживать положение ротора с помощью нескольких датчиков Холла. При помощи таких несложных устройств получается значительно улучшить характеристики, но стоимость электродвигателя увеличится в несколько раз.
Запуск бесколлекторных моторов

Изготавливать микроконтроллеры самостоятельно нет смысла, намного лучшим вариантом окажется покупка готового, пусть и китайского. Но необходимо придерживаться следующих рекомендаций при выборе:
- Учитывайте максимально допустимую силу тока. Этот параметр обязательно пригодится для различных видов работы привода. Характеристика часто указывается производителями непосредственно в названии модели. Очень редко указываются значения, характерные для пиковых режимов, в которых микроконтроллер не может работать продолжительное время.
- Для продолжительной работы необходимо учитывать и максимальную величину напряжения питания.
- Обязательно учитывайте сопротивление всех внутренних цепей микроконтроллера.
- Обязательно нужно учитывать максимальное число оборотов, которое характерно для работы этого микроконтроллера. Обратите внимание на то, что он не сможет увеличить максимальную частоту вращения, так как ограничение сделано на уровне программного обеспечения.
- Дешёвые модели микроконтроллерных устройств имеют импульсов в интервале 7...8 кГц. Дорогие экземпляры можно перепрограммировать, и этот параметр увеличивается в 2-4 раза.
Старайтесь подбирать микроконтроллеры по всем параметрам, так как они влияют на мощность, которую может развить электродвигатель.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.

В том случае, если нет таких устройств, необходимо считывать обратное напряжение. Оно генерируется в катушках статора, не подключенных на данный момент времени. Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током. Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи. Они позволяют из постоянного напряжения сделать трехфазные импульсы.

Работа происходит следующим образом:
- На катушку "А" поступают импульсы с положительным значением. На катушку "В" - с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки "А", при этом импульс положительного значения поступает на обмотку "С". Коммутация обмотки "В" не претерпевает изменений.
- На катушку "С" попадается положительный импульс, а отрицательный поступает на "А".
- Затем вступает в работу пара "А" и "В". На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку "В", а отрицательный на "С".
- На последнем этапе происходит включение катушки "А", на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Преимущества использования

Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы. Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
Среди недостатков можно выделить очень высокую стоимость, если учитывать еще и цену контроллера. Даже кратковременно включить для проверки работоспособности такой электродвигатель не получится. Кроме того, ремонтировать такие моторы намного сложнее из-за их особенностей конструкции.
Бесколлекторные двигатели на сегодняшний день являются довольно распространенными. Применяются данные устройства чаще всего с электроприводами. Также их можно встретить на различном холодильном оборудовании. В промышленной сфере они задействованы в системах нагрева.
Дополнительно бесколлекторные модификации устанавливаются в обычные вентиляторы для кондиционирования воздуха. В наше время на рынке представлено множество моделей с датчиками и без них. При этом по типу регуляторов модификации довольно сильно отличаются. Однако чтобы разобраться в данном вопросе более подробно, необходимо изучить устройство простого двигателя.
Устройство бесколлекторной модели
Если рассматривать обычный трехфазный бесколлекторный двигатель, то катушка индуктивности у него устанавливается медного типа. Статоры используются как широтные, так и импульсные. Зубцы у них применяются разного размера. Как говорилось ранее, существуют модели с датчиками, а также без них.
Для фиксации статора используются колодки. Непосредственно процесс индукции происходит за счет обмотки статора. Роторы чаше всего применяются двухполюсного типа. Сердечники у них устанавливаются стальные. Для закрепления магнитов на моделях имеются специальные пазы. Непосредственно управление бесколлекторным двигателем происходит при помощи регуляторов, которые располагаются у статора. Для подачи напряжения на внешнюю обмотку в устройствах устанавливаются изолирующие затворы.

Двухразрядные модели
Безколлекторные эл. двигатели данного типа часто используются в морозильном оборудовании. При этом компрессоры для них подходят самые разнообразные. В среднем мощность модели способна достигать 3 кВт. Схема бесколлекторного двигателя катушки чаще всего включает двойного типа с медной обмоткой. Статоры устанавливаются только импульсные. В зависимости от производителя длина зубцов может меняться. Датчики используются как электрического, так и индуктивного типа. Для систем нагрева указанные модификации походят плохо.
Также следует учитывать, что сердечники в бесколлекторных двигателях встречаются в основном стальные. При этом пазы для магнитов используются довольно широкие, а расположены они очень близко друг к другу. За счет этого частотность у устройств может быть высокой. Регуляторы для таких модификаций подбираются чаще всего одноканального типа.
Трехразрядные модификации
Трехразрядный бесколлекторный двигатель отлично подходит для систем вентилирования. Датчики у него используются, как правило, электрического типа. При этом катушки устанавливаются довольно широкие. За счет этого процесс индукции осуществляется быстро. В данном случае частотность устройства зависит от статора. Обмотка у него чаще всего встречается медного типа.
Предельное напряжение трехразрядные бесколлекторные двигатели способны выдерживать на уровне 20 В. Тиристорные модификации в наше время встречаются довольно редко. Также следует отметить, что магниты в таких конфигурациях могут устанавливаться как на внешней, так и на внутренней стороне роторной пластины.

Четырехразрядные модификации своими руками
Сделать четырехразрядный бесколлекторный двигатель своими руками можно абсолютно просто. Для этого необходимо в первую очередь заготовить пластину с пазами. Толщина металла в данном случае должна составлять примерно 2.3 мм. Пазы в этой ситуации обязаны находиться на расстоянии в 1.2 см. Если рассматривать простую модель, то катушку следует подбирать диаметром в 3.3 см. При этом пороговое напряжение она обязана выдерживать на уровне 20 В.
Колодки для устройства чаще всего подбираются стальные. В данном случае многое зависит от размеров роторной пластины. Непосредственно статор надо использовать с двойной обмоткой. При этом сердечник важно заготавливать стального типа. Если рассматривать модификации без регуляторов, то закончить сборку бесколлекторного двигателя можно установкой изолирующего затвора. При этом контакты устройства необходимо вывести на внешнюю сторону пластины. Для обычного вентилятора такие бесколлекторные модели подойдут идеально.
Устройства с регулятором АВР2
Бесколлекторный двигатель с регуляторами данного типа на сегодняшний день является весьма востребованным. Подходят указанные системы больше всего для приборов кондиционирования. Также они в промышленной сфере широко используются для холодильного оборудования. Они способны работать с электроприводами различной частотности. Катушки у них чаще всего устанавливаются двойного типа. При этом статоры можно встретить только импульсные. В свою очередь, широтные модификации являются не сильно распространенными.
Датчики в бесколлекторных двигателях с регуляторами данной серии используются только индуктивные. При этом частотность устройства можно отслеживать по системе индикации. Колодки, как правило, устанавливаются контактного типа, и крепиться они могут непосредственно на статорной пластине. Регулятор бесколлекторного двигателя в данном случае позволяет менять частотность довольно плавно. Происходит данный процесс за счет изменения параметра выходного напряжения. В целом эти модификации являются очень компактными.

Двигатели с регуляторами АВР5
Бесколлекторный двигатель с регулятором данной серии часто применяется в промышленной сфере для управления различными электроприборами. В бытовых устройствах он устанавливается довольно редко. Особенностью таких бесколлекторных модификаций можно назвать повышенную частотность. При этом параметр мощности у них менять просто. Катушки в данных модификациях встречаются самые разнообразные. Также следует отметить, что магниты чаще всего устанавливаются на внешней стороне роторной коробки.
Затворы в основном используются изолированного типа. Монтироваться они могут как у статорной коробки, так и сердечника. В целом регулировка устройства происходит довольно быстро. Однако следует учитывать также и недостатки таких систем. В первую очередь они связаны с перебоями питания при низких частотах. Также важно упомянуть, что у моделей данного типа потребление электроэнергии довольно большое. При этом для управления интегральными электроприводами устройства не подходят.
Использование регуляторов АВТ6
Данного типа регулятор скорости бесколлекторного двигателя на сегодняшний день пользуется большим спросом. Отличительной его особенностью можно смело назвать универсальность. Устанавливаются регуляторы, как правило, на бесколлекторные двигатели, мощность которых не превышает 2 кВт. При этом для управления системами вентилирования указанные устройства подходят идеально. Контроллеры в данном случае могут устанавливаться самые разнообразные.
Скорость передачи сигнала в данном случае зависит от типа системы управления. Если рассматривать тиристорные модификации, то они обладают довольно высокой проводимостью. При этом проблемы с магнитными помехами у них возникают редко. Самостоятельно собрать модель данного типа довольно сложно. В этой ситуации затворы чаще всего подбираются неизолированные.

Модели с датчиками Холла
Бесколлекторные двигатели с датчиками Холла широко используются в приборах нагрева. При этом подходят они для электроприводов различного класса. Непосредственно регуляторы используются только одноканальные. Катушки в устройстве устанавливаются медного типа. При этом величина зубцов модели зависит исключительно от производителя. Непосредственно колодки для устройств подбираются контактного типа. На сегодняшний день датчики чаще всего устанавливаются со стороны статора. Однако на рынке представлены также модели с нижним их расположением. В таком случае габариты бесколлекторного двигателя будут немного большими.

Низкочастотные модификации
Низкочастотный бесколлекторный двигатель на сегодняшний день активно используется в промышленной сфере. При этом для морозильных камер он подходит идеально. В среднем параметр полезного действия у него находится на уровне 70%. Затворы у моделей чаще всего используются с изоляторами. При этом тиристорные модификации в наше время встречаются довольно часто.
Системы управления используются серии АВР. При этом частотность модели зависит от типа сердечника и не только. Также следует учитывать, что существуют модели с двойными роторами. В данном случае магниты располагаются вдоль пластины. Статоры чаще всего используются с медной обмоткой. При этом низкочастотные бесколлекторные двигатели с датчиками встречаются очень редко.

Высокочастотные двигатели
Указанные модификации наиболее востребованными считаются для резонансных электроприводов. В промышленности такие модели встречаются довольно часто. Датчики у них устанавливаются как электронного, так индуктивного типа. При этом катушки чаще всего имеются на внешней стороне пластины. Роторы монтируют как в горизонтальном, так и вертикальном положении.
Непосредственно изменение частотности у таких устройств осуществляется через контроллеры. Устанавливаются они, как правило, со сложной контактной системой. Непосредственно стартеры используются только двойного типа. В свою очередь, системы управления зависят от мощности бесколлекторного устройства.
@@ Конструктивные особенности CD-ROM движков очень разные. Поэтому в этой статье даются общие рекомендации по переделке таких двигателей с минимальными затратами в 3 фазные авиамодельные двигатели.
@@ Требования к CD-ROM движкам (данные приведены для двигателей, которые реально переделывались):
- Число зубцов (полюсов) ротора должно быть равным 9
- Количество устанавливаемых заново магнитов - 12
- Диаметр ротора: 28.5 мм
- Высота ротора: 7.8 мм
- Диаметр оси: 3 мм
- Длина оси: 6.8 мм
- Диаметр статора: 24 мм
- Высота статора: 5.2 мм
- Вес переделанного двигателя - 21 г
- Тип намотки - дельта
- Намотка проводом диаметром - 0,4-0,5 (желательно ПЭТВ)
- Количество витков - 17-20 на зуб



@@
Используемые клеи: «111», фиксаторы резьбы (продаются в автомагазинах).
@@
Используемая эпоксидная смола: любая не российская и не 5-минутка.
Подготовительные работы
@@ На внутренней стороне ротора приклеено намагниченное пластмассовое кольцо. Аккуратно удалите его. Это можно сделать следующим образом: согнутый и нагретый гвоздь вводится в пластмассу. Даем ему остыть, и осторожно вытягиваем пластмассовое кольцо
@@ Статор отсоединяем от пластины, на которой он крепится (вариантов крепления очень много и поэтому я не привожу технологию - в каждом конкретном случае решайте сами как это сделать). Отсоединения статора, аккуратно удаляем с него намотку, Стараемся не повредить заводскую лакировку.
Перемотка
@@ Перемотку статора ведут медным проводом, диаметром 0.4mm - 0.5mm. На каждый полюс мотаем от 17 до 20 витков.




@@ Чем меньше витков, тем больше обороты, большее количество витков позволяет получить более высокий вращающийся момент. Изоляция провода должна остаться неповрежденной - это критично, иначе ваш двигатель не будет работать.

@@ Вы можете выбрать между типом намотки "дельты" и "звезда". С намоткой «звезда" двигатель будет иметь более высокий вращающий момент, меньше оборотов в минуту и будет «есть» меньше. Намотка "дельта" даст "более горячий" двигатель с более высокими оборотами в минуту и большим КПД, но будет иметь больший «аппетит» и будет греться больше. Намотка «звезда» «тяжелее» для работы контроллера.






Проверка качества
@@ Проверка качество намотки производится мультиметром. Провод НЕ ДОЛЖЕН быть сломан или с поврежденной изоляцией. Сопротивление обмоток должно быть примерно одинаковым. Провода обмотки не должны быть закорочены между собой или на статор (в случае повреждения изоляции). Если вы не уверены, что нет повреждений или «коротыша» - снимайте намотанный провод и мотайте еще раз. Соедините, закрепите и пропаяйте выводы обмоток. Сопротивление обмоток ~ 0,1-0,14 ом на фазу.
Установка новых магнитов в ротор
@@ ОЧЕНЬ ВАЖНО - магниты должны быть установлены с соблюдением полярности - N-S-N-S ..., иначе ваш двигатель не будет работать. Хороший способ проверять полярность состоит в том, чтобы разместить 12 магнитов на столе в один ряд, в таком же порядке приклеивать магниты в стакан ротора. Для приклеивания используйте высококачественный клей (не используйте эпоксидную смолу 5-минутку).



@@ Добейтесь равномерного размещения магнитов в стакане ротора. Как можно это сделать: устанавливая магниты в стакан, прокладывайте их тонкими кусочками бумаги одинаковой толщины, если один из зазоров получился больше, то увеличьте толщину бумаги. Расстояние между магнитами должно быть одинаковым. Не пожалейте времени, чтобы сделать эту работу. После установки магнитов и их приклейки, заполните промежутки между ними эпоксидной смолой. Будьте осторожны, не перелейте смолы.
Испытание
@@ Трения между ротором и магнитами не должно быть. Если движение при проворачивании без значительного усилия и толчков, то можете пробовать запускать собранный двигатель.
@@ ВЫ МОЖЕТЕ изменить направление вращения, меняя 2 из этих 3 контактов между двигателем и контроллером.



@@ Готовые моторы.